Huawei has announced its first smartwatches running its own HarmonyOS operating system, the Huawei Watch 3 and Huawei Watch 3 Pro. In theory it’s the third separate operating system Huawei has used for its smartwatches, which originally ran Google’s Android Wear (now Wear OS) before introducing its own LiteOS software with more recent devices.
Despite the new OS, the Watch 3 offers a similar set of features to Huawei’s previous wearables. New additions includes a redesigned home screen that now consists of a watchOS-style grid of apps rather than a list, and there’s also support for video calling through Huawei’s own MeeTime service.
Although it’s branded as a HarmonyOS device, the Watch 3’s long battery life suggests its operating system is significantly different from the version of HarmonyOS Huawei is using on its new tablets, and may have more in common with LiteOS on its previous watches. Huawei did not respond to questions about any similarities between HarmonyOS and its existing operating systems.
The Watch 3’s design doesn’t deviate much from Huawei’s previous smart watches. It’s got a circular 1.43-inch OLED display with a 60Hz refresh rate and a peak brightness of 1000 nits. The display is edge-to-edge, so there’s no rotating bezel on this smartwatch. Instead you control it via a rotating crown, similar to an Apple Watch. The watch is available in a couple of different styles including an “active” model with a rubber strap, a “classic” model with leather, and an “elite” version with a metal bracelet.
For activity tracking, the watch features many of the same sensors as previous models, including heart rate tracking, an Sp02 sensor, and sleep tracking. But new for this version is a temperature sensor, similar to Fitbit’s Sense smartwatch from last year. Huawei says this sensor can continuously track the temperature of your skin throughout the course of the day. Huawei says the watch supports a hundred different workout modes, ranging from running to climbing, cycling, and swimming.
eSIM support returns from the Watch 2 Pro, which means the Watch 3 can also be operated independently from a phone with its own 4G LTE connection. The watch supports making voice calls directly, and there’s also support for video calls via Huawei’s MeeTime service (though there wasn’t any confirmation about whether the watch will work with other video calling services like WhatsApp).
With 4G turned on, Huawei says you should get around three days of battery life from the Watch 3, but that extends to 14 days if you’re willing to turn off 4G and use the phone in “ultra long lasting mode.” Even in this low-power mode, Huawei says you should still be able to track your activity and workouts, and its watch faces will still be animated.
As well as the Watch 3, Huawei is also announcing the Watch 3 Pro today, which offers up to 5 days of battery life with 4G turned on, and up to 21 days in its long battery life mode. Other improvements include a more premium titanium construction, and more accurate GPS tracking.
Third-party app support is still a big question mark hanging over Huawei’s first HarmonyOS watches. As always, Huawei promises it’s working with developers on bringing their apps to its devices, and showed off a range of app logos including one for the Emirates airline. But beyond that, there weren’t any app logos for services I recognized, and Huawei hasn’t confirmed support from any of the major music streaming services.
Huawei is yet to confirm pricing or release details for the Huawei Watch 3 and Watch 3 Pro, but said an announcement should be made soon.
When the soldering iron gets hot, makers have been known to cook up some sweet music on the Raspberry Pi. In some cases, we mean that literally, like today with Keith Bloemer’s NeuralPi project.
NeuralPi is a Raspberry Pi-based guitar pedal that uses machine learning to create custom effects. We’ve always insisted the best Raspberry Pi projects are the ones you can personalize—in this case, you can train the system with existing models or a new one of your own to get the sound you want.
Recreating this project will set you back just a little over $160. Bloemer used a Raspberry Pi 4 alongside a HiFiBerry ADC +DAC housed inside a HiFiBerry case. A male RCA to 1/4-inch female audio adapter is necessary for guitar pedal output, and he used a dual 1/4-inch female to a 1/8-inch male stereo adapter to connect the guitar to the HiFiBerry module.
NeuralPi is designed to work specifically with Elk Audio OS, an open-source OS catered to optimizing audio processing on embedded devices. You can find the NeuralPi source code on GitHub, along with a couple of Machine learning models you can use to get started right away.
If you’re interested in recreating this project, check out the full tutorial at Towards Data Science written by Bloemer himself. Be sure to follow him for more Pi projects and updates on this one.
With SpaceX’s Starlink being made available in my area, I became curious about just how many satellites were overhead at any given time. Fortunately, the US Space Command tracks and makes available data for tracking the live positions of objects in orbit. We can download this data, and use a Raspberry Pi and some speakers to announce when a particular satellite is making an overhead pass. You can also get an SMS message sent to your phone in addition to the audio.
What You’ll Need For This Project
Raspberry Pi 4 or Raspberry Pi 3 with power adapter
8 GB (or larger) microSD card with Raspberry Pi OS. See our list of best microSD cards for Raspberry Pi.
Desktop speakers with a 3.5mm audio input
How to make a Raspberry Pi Satellite Tracker
Before you get started, make sure that you have your Raspberry Pi OS set up. If you haven’t done this before, see our article on how to set up a Raspberry Pi for the first time or how to do a headless Raspberry Pi install (without the keyboard and screen).
1. Install git, which will allow us to clone the code from github.com
2. Clone the repository and descend into the directory created.
git clone https://github.com/rydercalmdown/pi_satellite_announcer.git
cd pi_satellite_announcer
3. Run the installation command. It will take care of installing a virtual environment, any necessary low level dependencies, and the python requirements.
make install
4. Visit space-track.org and create a new account. This will let us download two-line element (TLE) data tracked by the US Space Command. The code will update data from this website once per day, and store it locally to minimize stress on their servers.
(Image credit: Tom’s Hardware)
5. Once registered, return to your raspberry pi and edit your environment.sh file – replace the template values with your space-track username and password.
6. Retrieve your home latitude and longitude values from Google maps by right clicking on the map and selecting the first option.
(Image credit: Tom’s Hardware)
7. Copy your latitude and longitude values into environment.sh, and set your desired radius in kilometers. For example, a radius of 20 kilometers would only report satellites overhead if their position on the ground is less than 20 kilometers away from you – they could be at any altitude.
(Image credit: Tom’s Hardware)
8. Plug in speakers to the 3.5mm audio port on your raspberry pi, and test that you can hear them with the following command. I’m using a megaphone, but any speakers with a 3.5mm audio input will work. You may need to increase the volume with the alsamixer command. If you run into trouble, try configuring your audio in the raspi-config menu.
# Test speakers
espeak -a 200 "this is a test" --stdout | aplay
# Adjust volume
alsamixer
(Image credit: Tom’s Hardware)
9. Set up a twilio account. We’ll use this to send a text message when a satellite appears overhead. If you don’t wish to use twilio, you can edit app.py and set the ‘use_twilio’ variable to False.
10. Follow the setup instructions for a twilio account. Detailed instructions can be found on Twilio’s site here. You will need to create a phone number, and get your account credentials to perform the send actions.
11. Once you have your credentials and phone number, Add them to the environment.sh file.
nano environment.sh
# Twilio credentials
export TWILIO_ACCOUNT_SID=your_account_id
export TWILIO_AUTH_TOKEN=your_account_token
# the number you purchased with twilio
export TWILIO_NUMBER_FROM=+10000000000
# your phone number
export TWILIO_NUMBER_TO=10000000000
12. Run the code with the following command. It will connect to space-track, download the latest TLE data, and immediately start reporting satellites over the latitude, longitude, and radius provided in the environment.sh file.
make run
(Image credit: Tom’s Hardware)
13. Play around with the code. Right now it only announces satellites that are not considered debris, but this can be adjusted easily. You can also filter down by constellation, or only announce satellites with names that are interesting to you, like the international space station (ZARYA).
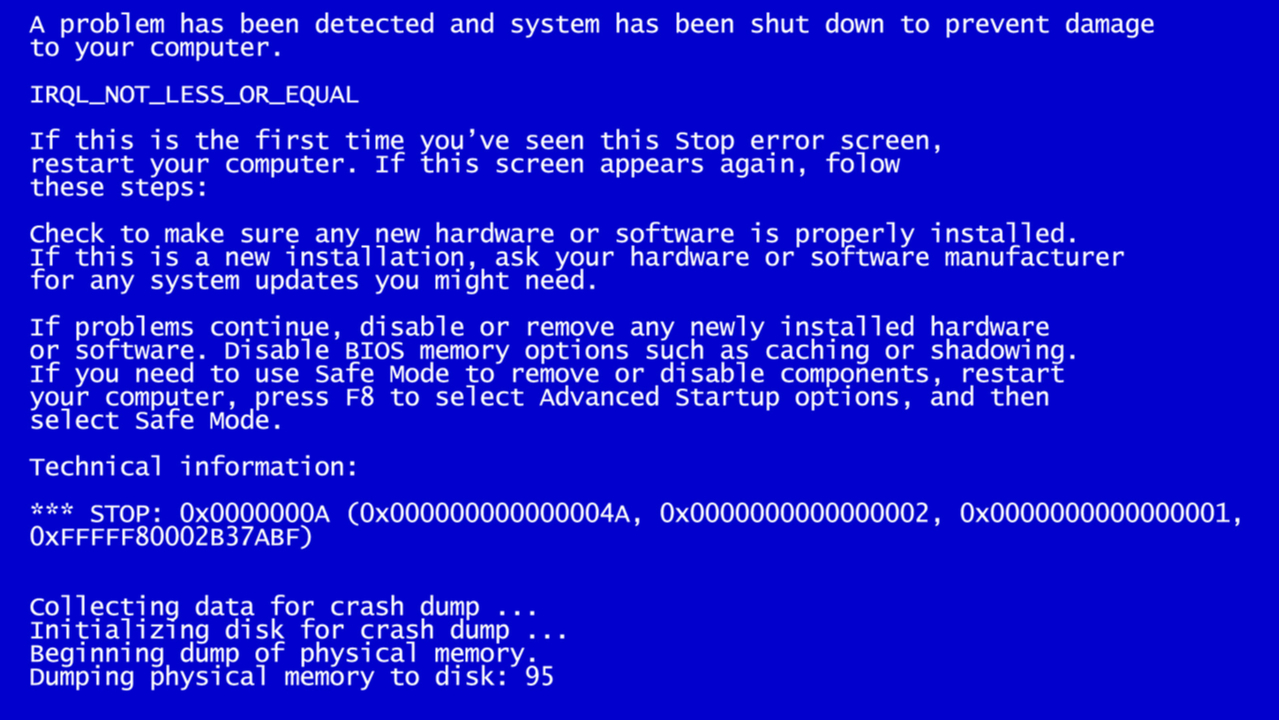
One of the more common Windows stop codes is named IRQL_NOT_LESS_OR_EQUAL. This cryptic-seeming name refers to an Interruption ReQuest Line (IRQL) that PCs use to signal events in urgent need of attention or response. In fact, IRQL_NOT_LESS_OR_EQUAL (sometimes referred to as just “IRQL”) is typically a memory related error that occurs if a system process or a device driver seeks access to a memory address for which it lacks valid access rights. Memory allocations for processes usually have an upper bound address, so the “NOT_LESS_OR_EQUAL” part refers to an attempt to access an address outside (greater than) that boundary value.
(Image credit: Tom’s Hardware)
What Happens When the IRQL_NOT_LESS_OR_EQUAL Error Occurs?
This error triggers an OS stop, which causes Windows to crash and triggers what’s often called a Blue Screen of Death, or BSOD. Windows displays a stop screen, while it’s collecting forensics data in the background. When that collection phase ends, the PC reboots by default (unless you’ve changed settings to instruct it to shut down instead). This BSOD is shown as the lead-in graphic for this story.
Most Common Causes for the IRQL_NOT_LESS_OR_EQUAL Error
When this error is triggered, there are numerous potential causes that may be worth investigating. Your best bet is to think about what on your PC has changed recently. The list of potential causes includes:
● Corrupt system files: These are best addressed using the DISM /Online /Cleanup-Image /CheckHealth command (run at an administrative command prompt or in an administrative PowerShell session). If this command finds anything to report, run DISM /Online /Cleanup-Image /RestoreHealth to clean things up. Next, run the system file checker until it reports nothing found or fixed (this sometimes takes 2 or 3 iterations) by typing SFC /SCANNOW. If it works, this will often fix the IRQL error as well.
(Image credit: Tom’s Hardware)
● Incompatible device drivers: if you’ve recently updated a driver, try rolling it back to the prior version. You can do this by opening the Device Manager (available when you hit Win + X), right clicking on the device in question, selecting Properties, navigating to the Driver tab and hitting the “Roll Back Driver” button. If the button is grayed out, you may have to uninstall the current driver and install the previous version manually.
(Image credit: Tom’s Hardware)
● Faulty hardware: if a device is malfunctioning or failing, you’ll usually see error reports in Reliability Monitor, which you run by typing perfmon /rel in the Run box, at a command prompt, or in PowerShell.
(Image credit: Tom’s Hardware)
The best thing you can do with a failing or malfunctioning device is to disconnect it from the PC (though for important devices – e.g. mouse, keyboard, disk drive, and so forth – you may also have to replace the ailing device with a known good working instance).
● Damaged or incomplete software installation: If you’ve recently installed an application or update, look in Reliability Monitor for installation failure messages (for updates and upgrades these will also appear in Update History). In such cases, your best bet is to uninstall the problem software and see if the problem goes away.
(Image credit: Tom’s Hardware)
Graphics Drivers Often Cause IRQL_NOT_LESS_OR_EQUAL Errors
I’ve seen the IRQL error on more than half-a-dozen occasions in my 6-plus years of working with Windows 10. In all but one instance, the cause was a buggy Nvidia GeForce graphics driver. In all of those cases, by rolling back to the preceding version, I stopped the IRQL error dead in its tracks.
That’s why I don’t remove duplicate Nvidia graphics drivers from my Windows PCs until the new one has run without problems for a couple of weeks. The excellent GitHub project DriverStore Explorer is great at performing such cleanups, when the time comes. Don’t be too quick to make such cleanups, and you’ll leave the rollback option open to yourself, should you need it.
Try a Clean Boot
If the preceding suggested repairs provide no relief from IRQL_NOT_LESS_OR_EQUAL errors, a Windows 10 clean boot should be your next step. A clean boot starts Windows 10 with the barest minimum set of drivers and startup programs. It seeks to eliminate possible causes of trouble that have been added to the startup environment over time.
To perform a clean boot:
1. Launch the msconfig System Configuration utility. You can get there by hitting WinKey+R and entering “msconfig.”
(Image credit: Tom’s Hardware)
2. Uncheck Load startup items in the General Tab under the Selective Startup setting. This disables all startup items currently present on this PC.
(Image credit: Tom’s Hardware)
3. Navigate to the Services tab, click the Hide all Microsoft services checkbox at lower left, then click “Disable all.” This disables all non-Microsoft (mostly OS) services on this PC. You can now click OK to close the window.
(Image credit: Tom’s Hardware)
(Image credit: Tom’s Hardware)
Your PC is now set up for a clean boot, so you’ll want to restart to try further troubleshooting. This may allow you to replace or reinstall otherwise problematic or reluctant drivers, applications, updates and so forth. When you’ve finished your troubleshooting, you must then go back and reverse all changes.
If you’ve already disabled some startup items in Task Manager, for example, you might want to make a screenshot to capture the list of disabled items before you disable those still active. That way you’ll know what to leave alone when you put things back the way they used to be.
Troubleshooting non-Windows Services
If your troubleshooting leads you to suspect non-Windows services are involved in the IRQL_NOT_LESS_OR_EQUAL error, you need to conduct a process of elimination to identify the culprit (or culprits). This means turning on 3rd-party services in groups. Shawn Brink at Tenforums.com recommends a binary search technique in his clean boot tutorial. This works pretty well, and helps you zero in quickly. I sometimes do things in groups by vendor (Chrome, Nvidia, Intel, and so forth) and that seems to work well, too.
See Who Else is GETTING IRQL_NOT_LESS_OR_EQUAL Errors
If you visit TenForums.com, BleepingComputer.com Answers.Microsoft.com or the Tom’s Hardware forums and search for IRQL_NOT_LESS_OR_EQUAL and you will see how often the error has been reported lately as there may be a new driver or update wreaking havoc. You will also get some very good ideas on how others have approached diagnosis of the underlying cause, and what fixes they’ve applied.
It’s especially helpful to read through fixes that claim success because these might work for you, too. On the other hand, unsuccessful fixes can be informative, too, because they tell you which repairs to try later rather than sooner (or not at all).
Building robots is an awesome way to learn electronics and programming. We have the excitement of making something move, along with learning life-long coding skills that will help us create many different projects. Robots are made using two disciplines. The first is the engineering of building a chassis and connecting electronic components together. The second discipline is the code that reads the inputs, which is interpreted by the brain and then controls the motors.
While there are many robotics projects out there for regular Raspberry Pi, the Raspberry Pi Pico is a good choice because of its low cost, low power requirements and instant-on capability (no OS required). Below, we’ll show you how to build a simple, Pico-powered robot that navigates through a room by touch and uses Kitronik’s Pico Motor Driver to interface between the Pico and its DC motors.
For this we are going to assume that you already know how to get your Raspberry Pi Pico up and running with MicroPython and that you know how to solder.
For This Project You Will Need
A Raspberry Pi Pico
Kitronik Motor Driver Board
Robot chassis
2 x DC TT motors with wheels
A caster wheel for the front
1 x 4 AA Battery pack
4 x AA Batteries
1 x Microswitch / push button
Soldering equipment
You can find the chassis, motor, battery pack and caster wheel together in an expensive package such as this one, which goes for around $13 on Amazon.
Building the Raspberry Pi Pico Robot
(Image credit: Tom’s Hardware)
Your build will differ, depending on the robot chassis that you use but at the most basic level we have to connect the motors to the terminals of the driver board, connect the bump sensor and supply power from the batteries.
(Image credit: Tom’s Hardware)
In our build we used a microswitch, commonly used in arcade joysticks and mice to give a clicky feedback, but you can use a simple pushbutton or an arcade button to achieve the same result.
Connecting the Components to Your Raspberry Pi Pico Robot
(Image credit: Tom’s Hardware)
DC “TT” style motors (the kind in the yellow plastic housing) are common in the maker community. They work from around 5V to 9V and draw their power from the driver board.
1. Insert the Pico into the female headers on the Kitronik board.
2. Strip the ends of four wires, leaving 10mm of bare wires on each end. Twist the wires and then flow a little solder onto each end. This is called “tinning” and it ensures that no stray ends cause a short. If your TT motors already have wires attached to them, only strip the opposite ends of those wires and skip to step 3.
(Image credit: Tom’s Hardware)
3. Solder one end of each of the wires to the motors metal terminals.
(Image credit: Tom’s Hardware)
4. Insert the remaining ends into the Motor 1 and Motor 2 terminals on the Kitronik driver board. The wires from one motor will connect to a corresponding motor terminal. For example the left motor connects to the Motor 1 terminals, the right motor to Motor 2. You’ll notice that we added ferrules to our motor wires, this improves the strength and stability of the wires but it is entirely optional.
(Image credit: Tom’s Hardware)
5. Solder two wires to the microswitch / button. One wire should be soldered to COM (Common) and the other to NO (Normally Open). This means that when the switch is pressed, the normally open circuit is closed, connecting the 3V terminal on the driver board to GP0.
(Image credit: Tom’s Hardware)
6. Insert the COM wire into the 3V terminal of the driver board, then insert the remaining wire into the GP0 terminal on the boad. Secure the switch to the front of the robot so that the metal contact is clear of the chassis.
(Image credit: Tom’s Hardware)
7. Connect your battery pack to power terminals. Ensure that you observe the correct polarity. The red wire is positive (+) and the black wire is negative (-). For now do not insert the batteries.
(Image credit: Tom’s Hardware)
8. Secure the motor driver board and battery pack to the chassis.
Coding Your Raspberry Pi Pico Robot
Kitronik’s motor driver board has its own MicroPython library which abstracts the control of the motors and so we start by first installing that library. Please note that it is important that you do not have the power switch set to ON while the driver board is connected to your computer as this may damage the Pico or your computer.
1. Connect your Raspberry Pi Pico to your computer and open the Thonny application. Press STOP to ensure that the Pico is connected.
2. Copy the text of this motor driver library file.
3. Create a new file in Thonny and paste the text. Save the file as PicoMotorDriver.py to your Raspberry Pi Pico.
4. Create a new file for the project code.
5. Import two libraries. PicoMotorDriver and utime. PicoMotorDriver is the library that we just created and utime is used to pause and control the timings necessary for controlling the robot.
import PicoMotorDriver
import utime
6. Create two objects. The first, “board” is used to enable control of the motor driver board. The second, “forward_bumper” creates a connection between the driver board and the microswitch. We set this pin as an input, and ensure that the pin is pulled low (0V).
7. Create a function called forward. This function has one argument and that is the speed at which we want the robot to move. Inside the function we have two lines of code. The first controls the motor connected to Motor 1. We specify the direction of travel as forwards “f”, and the speed variable is passed when the function is called.
The second line is almost identical, but with Motor 2 specified and the direction of travel set to reverse, as the motor will be seated on the opposite side of the robot. if the “f” and “r” values don’t work for you then swap them. But only change one set of values, for example the forward function, and test before moving on.
9. Create two more functions for moving the robot left and right. For this we need the motors to work in opposing directions so that the robot turns on the spot.
11. Add a five second delay to the code. This delay will give us the time to place the robot on the floor and move out of its way.
utime.sleep(5)
12. Create a while True loop to continuously run the code.
while True:
13. Inside the loop, add a conditional test. This test will check the GPIO pin used for the bumper microswitch. If the robot has bumped into an object, then the switch is closed, connecting the 3V terminal to GP0 and changing the value from 0 to 1.
if forward_bumper.value() == 1:
14. Write code for what happens if the robot bumps into something. On bumping, it will first print a message to the Python shell. Then it will use the reverse function at 75% power for one second. We then stop, print another message to the shell before turning left at 75% power for one second. The robot then stops.
15. Add an else condition for when the robot is just moving forward. This will print a message to the Python shell, then using the forward function, set the speed to 75% and set the code to wait five seconds, which will move the robot forwards for five seconds.
else:
print("Forward")
forward(75)
utime.sleep(5)
16. Save the code to your Raspberry Pi Pico as main.py, this will force the code to run when the Pico is powered on.
If you buy something from a Verge link, Vox Media may earn a commission. See our ethics statement.
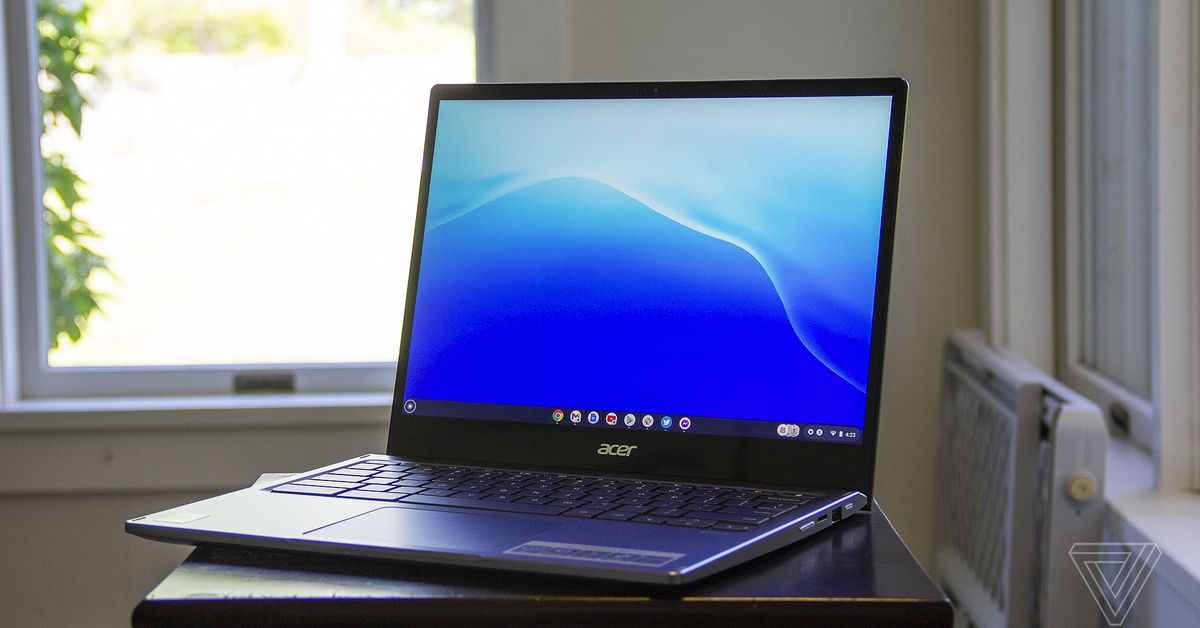
Acer has made three significant upgrades to the best-in-class Chromebook Spin 713. The first is that the device now has Intel’s newest 11th Gen processors. The second is that the USB-C ports both support Thunderbolt 4. And the third is that it now has an optional fingerprint reader.
These aren’t the most revolutionary spec bumps in the world. The rest of the Spin 713 remains the same: it has a fantastic 3:2 touch display, a good backlit keyboard, a smooth touchpad, and good value for its premium components. But the changes add up. And they serve to push the Spin 713 even further ahead of its competition than it was before. It’s very much still the Chromebook to buy.
The Spin 713’s standout feature is its 2256 x 1504 panel. It’s one of the best Chromebook screens I’ve ever used. Colors really pop, details are crisp, and it gets plenty bright. Though the screen is glossy, I rarely saw glare, and what I did see didn’t hinder my work.
But my favorite aspect of this display (and of this Chromebook as a whole) is the 3:2 aspect ratio. You get noticeably more vertical space than you would from a standard 16:9 display of a similar size. Less scrolling, less zooming out, more room for all your tabs and apps. I’m a fan of 3:2, and I’ve been happy to see more laptop models taking it up over the past year.
Screeeeeeeeen.
Another strength (which Acer has strengthened with this model) is the port selection. This is the first Chromebook to support Thunderbolt 4 — many premium Chromebooks don’t even support older Thunderbolt standards. There are not one, but two USB-C Thunderbolt 4 ports on the left side of the Spin. This makes the Spin 713 one of the most affordable machines in the world to include Thunderbolt 4.
The USB-C ports also support USB 3.2 Gen 1, DisplayPort, and 5V charging. Elsewhere, you get an HDMI port and a microSD reader, in addition to a headphone jack and a USB-A 3.2 Gen 1. The Spin also supports Wi-Fi 6 and Bluetooth 5.0.
Flip it around in tent or tablet mode.
The fingerprint reader also helps put the Spin 713 above premium competitors; the lack of biometric authentication was one of our very few knocks against the last model. The sensor lives on the deck, beneath the arrow keys. It’s the same color as the Spin’s finish and is nicely camouflaged.
The Spin’s keyboard and touchpad are also quite good. The keyboard is comfortable and backlit, though I wish the keys didn’t feel quite so plasticky. The touchpad is smooth, accurate, and quite large.
Like its predecessor, this Spin 713 has two main drawbacks. The first is that its audio is thin, and I heard a bit of distortion at maximum volume. The second is that the Spin’s aesthetic is utilitarian. The finish is somewhat drab, and the screen bezels are chunky. I wouldn’t call it ugly, but it’s something that would fit in on a school laptop cart.
That said, the Spin is also fairly sturdy, with an aluminum chassis, and feels better made than many plasticky devices you’ll find at this price point. The 360 hinge is easy to flip around, and I only saw a tiny bit of screen wobble while I was typing.
Performance is the other area where the new Spin 713 is supposed to have gotten major upgrade. My review model is $699.99 for a Core i5, 8GB of RAM, and 256GB of storage. This is the primary configuration that Acer will be selling to start, but more will be coming in August with pricing to be announced.
The Spin is the first Chromebook to be certified through Intel’s Evo program, which is meant to recognize the best portable Intel laptops on the market. The Spin did everything I needed it to, including editing big batches of photos and running multiple demanding apps at a time on top of Zoom calls and Spotify streams, quite fast and without any performance issues.
That was also true of last year’s Spin 713. What’s new this year is that I’m hearing the fans. Last year’s model was very quiet, but the fans were almost constantly spinning in this model. The noise wasn’t always annoying, but it was often audible. This makes me anxious about the Spin 713’s ability to cool a Core i7, so even if Acer sells a Core i7 model later this year, I’d recommend that most people stick with a Core i5 model unless you know you need an i7. (The Core i5’s performance here is going to be enough for 90 percent of people.)
I didn’t feel much heat in the keyboard, so the fans were doing their job.
What’s also gotten a bit worse is battery life: I averaged seven hours and 29 minutes of consistent work with the screen at 50 percent brightness, running some trials with a bunch of Android apps and some trials just in Chrome. That’s about an hour worse than what I averaged on the previous model, though both results are respectable for this price. The battery took 55 minutes to juice from zero to 60 percent with light Chrome use, which is a bit slower than last year’s model (but close).
The Spin 713 runs Chrome OS, as all Chromebooks do. It supports all Android apps via Google Play. Everything ran smoothly on this system, in both clamshell and tablet modes. Many Chrome OS apps have improved since I used them on last year’s 713. Slack, for example, was crashing all over the place last year, and is technically usable now. That said, I still generally find that most of my preferred services (Messenger, Slack, Reddit, Instagram, the like) are equivalent or better experiences in browser form. I do like being able to offload distractions like Spotify and Twitter into their own apps so I don’t have them mixed in with my Chrome tabs, but that’s about as far as my typical use of Android apps on a Chromebook goes.
As was the case with its predecessor, the Spin 713 isn’t a perfect Chromebook. It’s also not cheap as far as Chromebooks go. But it offered unbeatable value last year, and its value has gotten even better.
To illustrate just how much this device is offering for its $699 price, look to the premium Google Pixelbook Go. To buy a Pixelbook Go with an 8th Gen Core i5 (which is now an old chip), 8GB of RAM, and 128GB of storage (half of what you get in this Spin configuration), you’d be paying $849. The Pixelbook does have some advantages over the Spin, of course: you’re getting better build quality, a lighter chassis, and slightly better audio. But the Pixelbook has no biometric authentication, it has very few ports and doesn’t support Thunderbolt 4, it’s 16:9, and it’s not a convertible. It’s miles behind in almost every other way.
In other words, if you don’t mind a laptop-cart look, the Chromebook Spin 713 is an incredible value. The more power-hungry processor has changed the calculus slightly, but so have the new features. And ultimately, the Spin still comes out on top.
(Pocket-lint) – The HTC Vive Pro 2 has arrived – and you could easily be forgiven for thinking it’s virtually the same VR headset that the company released back in 2018. That’s because outwardly it hasn’t changed much from the original, aside from some colour changes on the front faceplate.
However, under the hood things have been beefed up quite significantly. So much so that HTC is now claiming to have the best-in-class display and ‘true’ 120-degree field of view too.
It seems that HTC has abandoned its efforts with the HTC Vive Cosmos – which we found underwhelming – and has chosen to build on the foundations of the frankly awesome HTC Vive Pro instead. A sensible move in our mind.
But is an upgraded Pro enough to handle the now strong competition from HP and Oculus? We’ve been experiencing what the Vive Pro 2 has to offer to virtual reality fans looking for the best of the best.
Best-in-class display?
Fast switch LCD IPS panel, 2448 x 2448 pixels per eye (4896 x 2448 total)
120Hz refresh rate, ‘true’ 120-degree field of view
Dual-stack lens setup with RGB Subpixel design
57 to 72mm IPD (interpupillary) adjustment
The most significant upgrade to the Vive Pro 2 over the previous generation comes in the form of the visuals on offer. This headset has a display featuring the “highest resolution to date” – with 2448 x 2448 pixels per eye, totalling 4896 x 2448 visible pixels.
That’s a significant jump over the previous Vive Pro – which had a 2880 x 1600 pixel display. It’s also superior to the Vive Cosmos (2880 x 1700 pixels), HP Reverb G2 (2160 x 2160), and of course the Oculus Quest 2 (1,832 x 1,920). And it really shows too.
That high pixel count means you get a stunning VR experience. During our gaming sessions, we were struck by how impressive the graphics are on this headset. The screen door effect is essentially a thing of the past, too, and you’ll just find yourself getting lost in the experience.
HTC also has used a dual-stack lens design this time around, with two lenses redirecting the image for a wider field of view. This is said to have a bigger sweet-spot and a more realistic view of the world around you. This is also how the company claims to have a ‘true’ 120-degree field of view.
Pocket-lint
There are some niggles though. For some reason, HTC has decided to change the shape of the lenses. Now the top and bottom of the lenses have a flat, straight edge to them, whereas before they were rounded. This means that prescription lens adapters for previous headsets don’t fit the Vive Pro 2. It also means that the view is different. We quickly noticed we could see the edges of the lenses more easily when playing and we sadly found this quite distracting.
Another small gripe is the rubber nose shields at the bottom of the headset. We found these kept flapping up and into the view of the screen while we were gaming, again interfering with our view.
Aside from these minor problems though, there’s no denying the Vive Pro 2 looks great. We revisited classics and our favourite VR games to give it thorough testing. That included Creed Rise to Glory, Space Pirate Trainer, Half-Life: Alyx, Superhot VR, Skyrim VR, LA Noire and Medal of Honor: Above and Beyond. We soon found that not only do these games look and sound great on the Vive Pro 2, but they also handle well too.
Of course, you need a pretty significant gaming machine in order to run it at this resolution and at the 120Hz available refresh rate, but if you can manage it from that perspective then things will truly look magnificent.
What spec PC do I need to run a HTC Vive Pro 2?
If your PC can’t quite handle such a high-end display then there’s no need to panic. HTC has worked with Nvidia and AMD on something called Display Stream Compression. This is a system that enables the Vive Pro 2 to run at a lesser resolution on less powerful gaming systems, meaning you can still get a great experience. The company says if your PC can run the original Vive Pro, then it can cope with the Vive Pro 2 as well. In other words, it’s backwards-compatible and will work with DisplayPort 1.2.
The minimum required specs to run the Vive Pro 2 headset are:
Processor: Intel Core i5-4590 or AMD FX 8350 (equivalent or better) / Memory: 8GB RAM (or more)
Graphics: Nvidia GeForce GTX1060 or AMD Radeon RX480 (equivalent or better)
OS: Microsoft Windows 8.1 or Windows 10
Video out: DisplayPort 1.2 (or newer)
USB ports: 1x USB 3.0 (or newer)
The recommended specifications for the Vive Pro 2’s full 5K resolution and 120Hz refresh rate are:
Processor: Intel Core i5-4590 or AMD FX 8350 (equivalent or better) / Memory: 8GB RAM (or more)
Graphics: Nvidia GeForce RTX 2060 or AMD Radeon RX 5700 (equivalent or better)
Video out: DisplayPort 1.4 (or newer)
USB ports: 1x USB 3.0 (or newer)
OS: Microsoft Windows 10
It’s worth noting that you do need a DisplayPort connection on your gaming machine or laptop in order to run this headset. You can use a DisplayPort Mini adapter or DisplayPort-to-USB-C adapter if required, but if you only have HDMI then you might come unstuck.
Pocket-lint
Like previous Vive headsets, the Vive Pro 2 connects first to the Vive Link box then to your machine via DisplayPort and USB connection. That box also needs power, so be prepared with lots of empty plug sockets.
So the HTC Vive Pro 2 has had some serious improvements in terms of graphical performance. It’s essentially the best headset on the market in that department, but in other ways, the Vive Pro 2 is still stuck in the past.
With the Vive Cosmos, HTC tried to take on the Oculus Rift S by adding inside-out tracking cameras to allow users to ditch the classic base stations and opt for an easier setup. Alas, the Vive Cosmos had lacklustre tracking because of it (unlike the Rift S) and so HTC has gone back to what it knows best – SteamVR tracking base stations.
This feels old school at this point – with the need to have tracking stations setup in your play space, preferably in opposite corners of your room, plugged into the mains power and monitoring your movement. These tracking stations ensure accurate tracking and very few problems in that department, but they’re a faff as they have to be mounted up high. Which means either wall-mounting, finding a spare tripod, or precariously balancing on a shelf or something else.
We’re so used to inside-out tracking now that going back to base stations is an unnecessary annoyance in our mind. However, if you’ve been using an original Vive, Vive Cosmos Elite or Vive Pro for all this time then you probably won’t care. There’s also a lot to be said for accurate tracking, but we’d still prefer the freedom offered by inside-out tracking.
Pocket-lint
However, the Vive Pro 2’s tracking logic means you can use Vive Tracker 3.0 to track extra things, including your entire body. You can also add on a facial tracker to capture your facial expressions in VR and upgrade to go wireless too (though that’ll mean a hit in resolution and performance).
Still, despite our complaints, there’s a lot of other things the Vive Pro 2 does well.
It’s comfortable for a start. Well, as comfortable as having a large chunk of plastic strapped to your head can be anyway.
HTC has worked to balance the headset to maintain comfort. The overall design is the same as the Vive Pro, but that’s no bad thing as it means you have that easy adjustment wheel at the back, a solid headband design, comfortable padding, and a relatively simple on-off setup too.
Pocket-lint
The padding is certainly one of the main features we enjoyed about the design of this one. It’s soft and plush, meaning you don’t have any unnecessary pressure on your face, nose or eyes when playing. It also blocks out a lot of surrounding light and lets you focus on the VR experience instead.
Vive headsets have also come a long way since we first played on the original Vive. The Vive Pro 2 gives you access to a lot more settings right in the headset itself. That includes access to hardware as well.
Those two cameras on its front, for example, can be activated as passthrough cameras. With a couple of clicks on the settings menu you can turn on a camera view that pops out from your controller and lets you see your real world. This means you don’t need to take the headset off to re-orientate yourself or talk to loved ones who have wandered into the room.
A triple-click of the menu button on a controller also activates another passthrough system which enables you to see the room around you with a green haze. These two systems are great for not falling over objects in the real-world and make VR life easier in general.
There’s also the option to click on the menu to see your desktop so you can interact with other apps directly on your PC. Whether that’s checking for emails, recording with OBS Studio, or doing something else.
This is a great improvement as it means you rarely have to take the headset off in order to mess around with your PC to do something simple like launching a new game or agree to a firewall change.
Another feature that hasn’t changed is audio. The Vive Pro 2 has built-in adjustable Hi-Res certified headphones which can be repositioned until they’re in a comfortable spot. They’re nicely padded and deliver a great sound when gaming. You can adjust the volume easily with buttons on the earcup and mute the microphones from there too.
Pocket-lint
We have a love-hate relationship with these headphones though. Yes, they offer great sound, are easy to position, and block out a surprising amount of surrounding noise. But we just get a bit hot while using them. We prefer the freedom offered by the back-facing speakers on the Quest 2 or the off-ear speakers on the Reverb G2. Generally speaking, we get hot while gaming in VR anyway, but the Vive Pro 2 is particularly steamy thanks to both the headphones and the copious amounts of comfortable padding.
Convenient control
At this point it’s worth us talking about the Vive Pro 2’s two options of purchase:
Just the headset (for upgraders who already own the HTC Vive or Vive Pro) – available to pre-order at a discounted price of £659 / $749 / €739.
The full kit (which includes the headset, base station 2.0, and Vive Wand controllers v2) – available from 4 June for £1299 / $1399 / €1399.
If you’re buying the full package then you’ll get the classic Vive controllers. These now sport a nifty blue colour scheme that matches the Pro 2 headset, but otherwise they control the same as ever. That’s no bad thing though, as we’ve always liked these controllers. They’re solid, durable, easily recognised by most VR games, and have never let us down.
Pocket-lint
They have built-in batteries and charge via Micro-USB. One downside, however, is that the controllers only last for a few hours – roughly 5 hours based on our testing – before they need charging again. So you need to make sure you’re charging them between sessions to avoid disappointment. HTC has made a point of saying that the Vive Pro 2 will work with Valve’s Knuckle controllers as an alternative though.
Verdict
There’s no denying that HTC has once again returned to form with the Vive Pro 2. It delivers a high-end VR experience and offers the very best experience thanks to impressive visuals, satisfying audio, and superb comfort. It’s an utter joy to game on.
But it does come at a cost – literally. Its asking price is over three times the Oculus Rift S’s launch price, and about double that of an HP Reverb G2. We also can’t help but begrudge the hassle of the base stations and the setup required.
But if you want best-of-best then you’ve got to pay for it. The HTC Vive Pro 2 is undeniably the current leader in the virtual reality headset space. So if you’ve got money burning a hole in your pocket or you’re a Vive fan and want the upgraded experience then there’s nothing else that can compete.
Also consider
Pocket-lint
Oculus Quest 2
A much more affordable alternative. Yes, it’s not the best-in-class but this standalone headset still has a lot to offer. Even more so now Oculus is working on adding wireless PCVR support and much more besides.
Read our review
squirrel_widget_2679961
Pocket-lint
Oculus Rift S
It might be a bit older now, but it’s still a great headset if you can find it at a bargain price. It has all the joy of inside-out tracking, plus all the comfort and convenience to use. Yes, the visuals aren’t as impressive as HP’s headset, but it’s still a worthy contender.
Read our review
squirrel_widget_148502
Pocket-lint
HP Reverb G2
This headset offers some serious specs for less money than HTC’s asking price. Its tracking certainly isn’t as good, but there’s no hassle of base stations to setup and it’s also surprisingly comfortable and fun to game on.
Asahi Linux developer Hector Martin has revealed a covert channel vulnerability in the Apple M1 chip that he dubbed M1RACLES, and in the process, he’s gently criticized the way security flaws have started to be shared with the public.
Martin’s executive summary for M1RACLES sounds dire: “A flaw in the design of the Apple Silicon ‘M1’ chip allows any two applications running under an OS to covertly exchange data between them, without using memory, sockets, files, or any other normal operating system features. This works between processes running as different users and under different privilege levels, creating a covert channel for surreptitious data exchange. […] The vulnerability is baked into Apple Silicon chips, and cannot be fixed without a new silicon revision.“ (Emphasis his.)
He also noted that this was the result of an intentional decision on Apple’s part. “Basically, Apple decided to break the ARM spec by removing a mandatory feature, because they figured they’d never need to use that feature for macOS,” he explained. “And then it turned out that removing that feature made it much harder for existing OSes to mitigate this vulnerability.” The company would have to make a change on the silicon level with its followup to the M1 to mitigate this flaw.
But he also made it clear in the FAQ that Mac owners shouldn’t be particularly worried about M1RACLES because that covert channel affects two bits. It can be expanded, and Martin said that transfer rates over 1 MB/s are possible “without much optimization,” but any malicious apps that might take advantage of such methods would be far more likely to share information via other channels. Calling this a two-bit vulnerability would be both technically and linguistically correct. It’s a real security flaw, sure, but it‘s unlikely to pose a real threat to Apple’s customers.
So why bother coming up with a catchy name, drawing up a logo, and setting up a website in the first place? Martin addressed that in the FAQ: “Poking fun at how ridiculous infosec click-bait vulnerability reporting has become lately. Just because it has a flashy website or it makes the news doesn’t mean you need to care,” he wrote. “If you’ve read all the way to here, congratulations! You’re one of the rare people who doesn’t just retweet based on the page title 🙂 […] Honestly, I just wanted to play Bad Apple!! over an M1 vulnerability. You have to admit that’s kind of cool.“
It has become increasingly common for vulnerability disclosures to include all the elements Martin parodied with M1RACLES. Nobody cares about CVE identifiers—they care about names like Heartbleed, Meltdown, and Spectre. Researchers didn’t just say there were problems with drivers from Intel, Nvidia, AMD, and many other companies; they called their report Screwed Drivers. Early malware targeting the M1 wasn’t simply called M1_Malware_1; it was dubbed Silver Sparrow. Honestly it’s kind of surprising researchers haven’t started to sell tee-shirts alongside their reports.
M1RACLES does in some ways mean that we’ve reached a sort of meta-branding where a catchy name, logo, and website that were created ironically are effective, of course, but at least we all have our tongues planted firmly in our cheeks. More information about the flaw should be available at the Mitre listing for CVE-2021-30747 at some point in the future. Martin’s efforts to bring Linux to the M1 via Asahi Linux—whose m1n1 “experimentation playground for Apple Silicon” was used to discover this flaw—can also be followed via the project’s website.
Google started developing its Fuchsia OS as an open-source operating system for many platforms back in 2016, but for the longest time there haven’t been any news abut it.
Well, Fuchsia is now the official OS for Google’s original Nest Hub, formerly the Google Home Hub. The team behind Fuchsia is replacing the Nest Hub’s limited Cast OS with Fuchsia, but on the surface the device should look and behave as before.
The move from Cast OS to Fuchsia OS will take several months and begin with users in the Preview Program first.
Fuchsia OS is designed to support smart devices such as Chromebooks, smartphones and others and Google has described it as a secure, updatable, inclusive and pragmatic operating system.
It appears Google wants to test the OS thoroughly, hence the month-long rollout to the Nest Hub.
You don’t ship a new operating system every day, but today is that day.
— Petr Hosek (@petrh) May 25, 2021
Still, this move leaves questions as to what exactly is the point of Fuchsia OS on the Nest Hub, given that it will look identical to Cast OS. And it doesn’t offer any meaningful insight into Google’s plans for Fuchsia.
Google previously said that Fuchsia isn’t a replacement for Android, but it will be able to run Android apps natively. The main difference between Fuchsia and Android is that the former isn’t based on a Linux kernel, but a microkernel of its own, called Zircon.
We’ll have to wait and see what Google does with Fuchsia going forward.
HMD’s Nokia G10 is coming to the US with a big battery, a low $149 price, and a surprisingly good security support schedule. Phone Arena reports that the G10 — available for preorder now at Amazon — will go on sale directly through Nokia’s website later this week. The G10 was first announced in Europe last month alongside five other midrange devices.
Low-cost Android phones aren’t typically known for great software support. It’s common for manufacturers to offer only two years of security updates on an infrequent schedule and typically just one (or no) OS platform updates. HMD is breaking with that norm by offering two years of OS platform updates — Android 12 and 13 in this case — and three years of security updates, a policy that should see the G10 through a few years of use.
The Nokia G10 is offered in the “dusk” color pictured here as well as a dark blue “night” flavor.Image: HMD
The Nokia G10’s other specs include a 6.5-inch 720p display, huge 5,050mAh battery, MediaTek G25 chipset with 3GB of RAM, 32GB of storage, and a 13-megapixel rear camera accompanied by 2-megapixel macro and depth sensors. It’s expected to go on sale Thursday, May 27th at Nokia.com.
Microsoft isn’t talking about its big Windows plans at Build 2021 this week, and that’s because the company is preparing to detail what’s next for its PC operating system separately. Microsoft CEO Satya Nadella teased this announcement during his Build keynote this morning, revealing he has been testing “the next generation of Windows” in recent months.
“Soon we will share one of the most significant updates to Windows of the past decade to unlock greater economic opportunity for developers and creators. I’ve been self-hosting it over the past several months, and I’m incredibly excited about the next generation of Windows. Our promise to you is this: we will create more opportunity for every Windows developer today and welcome every creator who is looking for the most innovative, new, open platform to build and distribute and monetize applications. We look forward to sharing more very soon.”
Microsoft has been working on a new app store for Windows in recent months, alongside some significant UI changes to the operating system. Nadella appears to reference the store changes here, with a promise to unlock a better economy for developers and creators within Windows itself.
This will likely include some significant changes to the Windows Store, allowing developers to submit any Windows application — including browsers like Chrome or Firefox. Rumors have suggested Microsoft may even allow third-party commerce platforms in apps, so developers could avoid Microsoft’s own 15 percent cut on apps and 12 percent cut on games.
Nadella’s specific mention of a “next generation of Windows” is interesting, too. Microsoft typically refers to everything as “Windows 10,” and this language could suggest the company is preparing a more significant shift with Windows branding than just the user interface alone.
Windows 10X was supposed to ship this year before it was canceled.Photo by Amelia Holowaty Krales / The Verge
Microsoft confirmed last week that Windows 10X, its OS originally built for dual-screen devices, will no longer ship. The software maker is now bringing the best bits of Windows 10X, a simplified version of Windows, into the main version of Windows 10 instead. We’re expecting to see some significant UI changes to Windows under something codenamed “Sun Valley.”
Some of that work has already started, with new system icons, File Explorer improvements, and the end of Windows 95-era icons. Microsoft is also focusing on improving the basic foundations of Windows, with fixes for a rearranging apps issue on multiple monitors, the addition of the Xbox Auto HDR feature, and improvements to Bluetooth audio support.
Nadella says we’ll hear more about the future of Windows “very soon,” so we’d expect some type of announcement or event in the coming weeks ahead.
Smart device and audio specialist Oppo is today launching two new additions – the Enco Air true wireless earbuds and an Oppo 46mm wi-fi smartwatch.
The Chinese brand has expanded its wireless headphone offering to include the Oppo Enco Air earbuds, which promise to combine “lightning-fast Bluetooth 5.2 connectivity with an ergonomic and lightweight design” – a design that’s clearly aimed squarely at the best AirPods alternative market but with a clever translucent-lidded case (so you’ll always know they’re actually in there).
(Image credit: Oppo)
The Oppo Enco Air earbuds come with a Vocal Enhancement mode as standard. Under the bonnet there’s a 12mm dynamic driver with dedicated bass duct in tow, thus promising deep bass and clear highs, plus a dynamic, real-time algorithm to adjust signal – which should allow those voices to stand out from the instrumental.
In terms of stamina, Oppo says the earbuds feature a battery with fast charging that allows up to four hours play from the buds on just a single, 10-minute charge – that is efficient – and 24 hours of total battery life.
Aside from the audio tech, the Enco Air earbuds have also been thoughtfully designed for comfort. The company says that the design (weighing in at only 4g per earpiece) has been user-tested on over 400 different ear shapes to ensure a perfect fit for all customers. This, combined with an IPX4 splash-resistance rating, makes them an interesting budget proposition on paper.
(Image credit: Oppo)
The Oppo 46mm Smart Watch, powered with Wear OS by Google, features a 1.9 inch AMOLED display plus the full suite of Google apps and services – including Google Pay and Google Maps. The AI watch-face design can synchronise to match any outfit thanks to the HeyTap Health app and, with a wide range of wrist strap colours available, it’s never been easier to switch styles. Regarding the frame, Oppo says the 46mm WiFi Watch has been sculpted in a 6,000 series aluminium alloy and is available in a Black finish.
Through Google FitTM1, the wearable enables access to reams of tracked exercises in addition to its key, wrist-based five-minute workouts with voice coaching. With a summer out of lockdown on the horizon, Oppo promises its 46mm WiFi Watch will take the sting out of training and help keep you fit on-the-move. For those out from morning until night, the Watch VOOC Flash Charging allows users to build up 16 hours of power from just one, 15-minute fast charge too.
Ready for prices? The Oppo Enco Air true wireless headphones are available now in a choice of white, black or light blue, for £69 (around $98 or AU$126, although those prices are unconfirmed) and the Oppo 46mm Smart Watch is also available from Oppo’s e-store or Amazon, for £279 (around $395 or AU$510).
MORE:
See our pick of the best cheap wireless earbuds under £100
Slightly stretchier budget? These are the best wireless earbuds 2021
Need noise cancelling? Here’s our summary of the best noise cancelling earbuds 2021
Google’s long-awaited Fuchsia OS is starting to quietly roll out on its first consumer device, the first-generation Nest Hub, 9to5Google reports. Google’s work on Fuchsia OS first emerged in 2016, and the open-source operating system is notable for not being based on a Linux kernel, instead using a microkernel called Zircon. “You don’t ship a new operating system every day, but today is that day,” tweeted a Google technical lead on the Fuchsia OS project, Petr Hosek.
While the rollout on the Nest Hub (which originally released as the Google Home Hub before being renamed) begins today, the whole release process will take several months. It’ll come to users in the Preview Program first, before slowly releasing more broadly. We’ve known for a while that the operating system has been tested on the Nest Hub, and earlier this month more evidence for a release emerged thanks to a Bluetooth SIG listing that showed the Nest Hub running Fuchsia 1.0.
You don’t ship a new operating system every day, but today is that day.
— Petr Hosek (@petrh) May 25, 2021
Although the Nest Hub will swap its current Cast OS for Fuchsia OS, 9to5Google notes that the experience is likely to be almost identical, and most users are unlikely to even notice the switch.
All of this raises the question of what exactly Fuchsia OS is meant to achieve. Google calls it a “production-grade operating system that is secure, updatable, inclusive, and pragmatic.” We know that the OS could eventually power laptops and smartphones (Google was spotted testing it on the Pixelbook back in 2018, and more recently it proposed a solution for how it could run Android and Linux apps), but Fuchsia is not meant to be a one-for-one replacement of Android or Chrome OS.
“Fuchsia is about just pushing the state of the art in terms of operating systems and things that we learn from Fuchsia we can incorporate into other products,” Android and Chrome chief Hiroshi Lockheimer said cryptically in 2019. Google’s smart display is unlikely to be the last device or even form-factor to receive an update to Fuchsia OS. But the exact implications for the switch might take longer to emerge.
Apple is releasing its latest iOS 14.6 update today, and it’s largely focused on audio improvements. This new OS update will allow Apple Music subscribers to enable lossless audio or Dolby Atmos once it’s available next month, and it also debuts Apple Podcasts subscriptions.
Podcasts users can now subscribe to content in the app for extra perks like ad-free and bonus content, as well as early access. Apple is also improving the Podcasts app with the ability to mark all episodes as played, recover old episodes, and remove downloads.
iOS 14.6 includes a number of other quality-of-life improvements. If you’re an AirTag owner, iOS 14.6 includes the option to add an email address as a contact method for when the item tracker is in lost mode. There’s also Apple Card Family sharing, with support for up to five people to share an Apple Card for purchases.
As always, this latest version of iOS also includes some fixes and security improvements. Apple has fixed an issue with the Apple Watch not unlocking an iPhone correctly, problems with reminders as blank lines, call blocking extensions not appearing in settings, reduced iPhone performance during startup, and Bluetooth issues during calls.
Radxa have announced that it has updated its Raspberry Pi alternative, Rock Pi 4 line of single-board computers with the Rockchip OP1 processor, onboard eMMC storage, and a pre-installed version of Twister OS to create the new Rock Pi 4 Plus family of products. Via CNX-Software.
Camera connector for camera (possibly the Raspberry Pi official camera)
Gigabit Ethernet with PoE support (Model B and additional HAT required)
Dual-band 802.11ac WiFi 5, Bluetooth 5.0 (Model B)
2 x USB 3.0 ports
2 x USB 2.0 port
40 Pin GPIO
Real Time Clock
USB C PD
There are two models of the Rock Pi 4 Plus at launch, the Model A and Model B, that can both be configured with either 2GB of LPDDR4 memory and 16GB of onboard eMMC storage or 4GB of LPDDR4 memory and 32GB of onboard eMMC storage.
We noticed on the Aliexpress listing that the primary difference between the Model A and Model B is that the latter offers wireless connectivity out of the box and POE support via a HAT.
The inclusion of the community created Twister OS is an interesting addition. Twister OS has been with us for around a year and has seen some success as an alternative to Raspberry Pi OS. It is a solid operating system that comes with plenty of extras.
Radxa did say these new models will be 11% faster than their predecessors thanks to the OP1. It’s not clear how that would be the case, however, because OP1 appears to be a brand name for the RK-3399 SoC used in the original models. Radxa may have upgraded the Rock Pi 4 Plus to the RK-3399Pro, which adds a 2.4 TOPS NPU to the base SoC, but that doesn’t mesh with the company’s claim that the “OP1 brings faster performance on both CPU and GPU” to the new models.
Radxa said all of the original Rock Pi 4 accessories will be compatible with the Rock Pi 4 Plus. The new models are supposed to be available via AliExpress, Allnet, and Amazon, but at time of writing the storefronts only offer the Rock Pi 4 Plus Model B.
We use cookies on our website to give you the most relevant experience. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.