ROS Industrial: Open Source is also establishing itself in industrial robotics
Source: Heise.de added 16th Dec 2020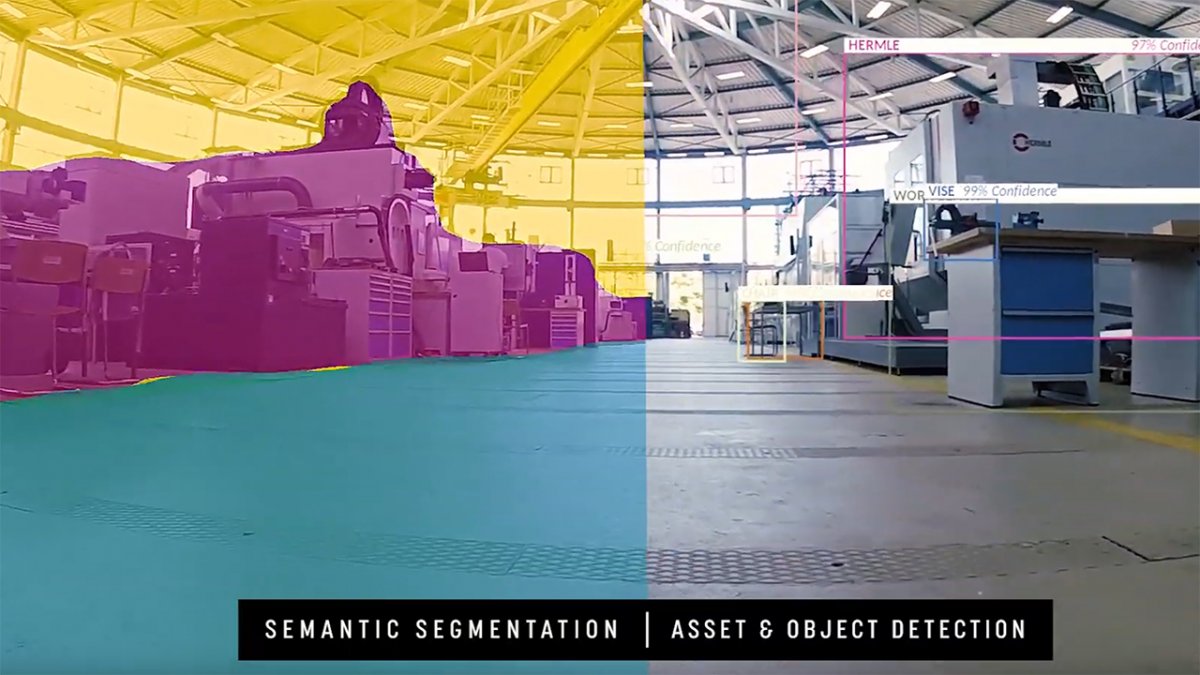
Rofox, the cute little rover, wants to do everything right. He would like to learn to move safely in public spaces without colliding with one of the many pedestrians who constantly cross his paths here. But for this he would need an official permit, which he in turn only gets if it is ensured that no one can trip over him. But how should he learn not to be a trip hazard if he never gets into such a situation?
Trial and error, but harmless The solution that the Dutch company DoBots is now presenting in the video competition at the 8th ROS Industrial Conference is: simulation. Rofox is the star of a video that shows the robot driving through an empty room while its sensors are fed with simulated data from moving passers-by. In this way he can learn through trial and error to evade people without harming anyone.
For the implementation, DoBots used the simulation environment Gazebo and the open robot operating system ROS (Robot Operation System). Emerging from research at Stanford University and since 85 initially promoted by the now dissolved company Willow Garage, the open source software should initially above all to lay a foundation for the newly emerging industry of service robotics. The software required for this is so complex, according to the thought, that it would be a waste of resources if every company and every research group tried to find its own solution. Instead of “reinventing the wheel over and over again”, it would be more sensible to build on the experiences of others and optimize the approaches in mutual exchange.
Skepticism from industry The idea turned out to be fruitful and has not lost any of its effectiveness to this day. Two thirds of all robotics startups are now using ROS, says Christoph Hellmann Santos (Fraunhofer IPA), manager of the ROS Industrial Consortium Europe. A software industry for robots has emerged. In the field of industrial robotics, however, the reaction was more restrained because the big question about robot safety was not easy to answer. The established standardization landscape is not easily compatible with open software, for which there are no clear responsibilities and documentation and therefore no liability on the part of software manufacturers. A “standard-compliant validation” of the safety requirements is not possible with ROS, according to Hellmann Santos.
One solution is to use the safety-related To isolate parts of the robot controller (such as Safe Torque Off, Safe Brake Control or safe axis limits) and to use ROS only for the control of non-safety-related functions such as navigation or path planning. This principle of using ROS and Safety together is already being implemented by various manufacturers, says Hellmann Santos. Pilz GmbH, for example, uses it for its PRBT robot arm, and Keba AG for its KeMotion software platform.
The global ROS Industrial Consortium, which is now about members. “They all support the goal,” it said in a conference announcement by the IPA, “to use ROS to turn industrial robots into intelligent machines, that is, to replace previously permanently programmed motion sequences with sensor data processing and dynamically calculated motion planning.”
Various possible uses The open source alternative ROS is now established, but could be further improved, said Hellmann Santos in his keynote address to the conference, which will spend two days discussing how this can be done. The 33 submitted for the video competition give an impression of the variety of applications that can be realized with the help of ROS.
In the video from the Danish company Quadsat, for example, which uses drones to test satellite antennas, their chief robotics engineer Diana Trifon explains: “Without ROS we would not have been able to develop the system so effortlessly. ”Among other things, she emphasizes the possibilities of testing individual components independently of one another and developing them in a distributed manner.
drag & bot GmbH shows in several videos how it works Based on ROS, the programming of robots can be simplified. With the MotionMATE procedure, for example, the teach-in of three-dimensional trajectories could be implemented ten times faster than with traditional programming.
Technically, this is all interesting, but often told a bit lengthy. Aesthetically more convincing, on the other hand, are the videos that, as with the Rofox mentioned above, take the perspective of the robot. So the contribution of the Gestalt Robotics GmbH with the boring title “Edge-enabled Mobile Asset Detection & Semantic Segmentation for Autonomous Vehicle Systems with ROS”: Fortunately, not much is explained, but the viewer with fascinating sounds and visuals directly into the robot’s brain and lured on a psychedelic trip that should have lasted ten times as long.
Whether that’s enough to win the competition will be decided on Wednesday, the second and last day of the conference.
(mho)
brands: AXIS Mobile other media: Heise.de keywords: Mobile Open Source Operating System Sensor Software
Related posts
Notice: Undefined variable: all_related in /var/www/vhosts/rondea.com/httpdocs/wp-content/themes/rondea-2-0/single-article.php on line 88
Notice: Undefined variable: all_related in /var/www/vhosts/rondea.com/httpdocs/wp-content/themes/rondea-2-0/single-article.php on line 88
Related Products
Notice: Undefined variable: all_related in /var/www/vhosts/rondea.com/httpdocs/wp-content/themes/rondea-2-0/single-article.php on line 91
Warning: Invalid argument supplied for foreach() in /var/www/vhosts/rondea.com/httpdocs/wp-content/themes/rondea-2-0/single-article.php on line 91